
Tomographic reconstruction
Tomographic reconstruction is a type of multidimensional
This article applies in general to reconstruction methods for all kinds of tomography, but some of the terms and physical descriptions refer directly to the reconstruction of X-ray computed tomography.
Introducing formula


The projection of an object, resulting from the tomographic measurement process at a given angle , is made up of a set of




where is the attenuation coefficient as a function of position. Therefore, generally the total attenuation of a ray at position , on the projection at angle , is given by the line integral:


Using the coordinate system of Figure 1, the value of onto which the point will be projected at angle is given by:


So the equation above can be rewritten as

where represents and is the Dirac delta function. This function is known as the Radon transform (or sinogram) of the 2D object.


The Fourier Transform of the projection can be written as
where [2]
![{\displaystyle P_{\theta }(\omega )=\int _{-\infty }^{\infty }\int _{-\infty }^{\infty }f(x,y)\exp[-j\omega (x\cos \theta +y\sin \theta )]\,dx\,dy=F(\Omega _{1},\Omega _{2})}](https://wikimedia.org/api/rest_v1/media/math/render/svg/36306c36f50bf7f3e670ee9136027e64f08b056a)

represents a slice of the 2D Fourier transform of at angle . Using the


where is the derivative of the Hilbert transform of


In theory, the inverse Radon transformation would yield the original image. The projection-slice theorem tells us that if we had an infinite number of one-dimensional projections of an object taken at an infinite number of angles, we could perfectly reconstruct the original object, . However, there will only be a finite number of projections available in practice.
Assuming has effective diameter and desired resolution is , a rule of thumb for the number of projections needed for reconstruction is [2]



Reconstruction algorithms
Practical reconstruction algorithms have been developed to implement the process of reconstruction of a three-dimensional object from its projections.
Fourier-domain reconstruction algorithm
Reconstruction can be made using interpolation. Assume projections of are generated at equally spaced angles, each sampled at the same rate. The

For instance, a concentric square raster in the frequency domain can be obtained by changing the angle between each projection as follow:

where is highest frequency to be evaluated.

The concentric square raster improves computational efficiency by allowing all the interpolation positions to be on rectangular DFT lattice. Furthermore, it reduces the interpolation error.[4] Yet, the Fourier-Transform algorithm has a disadvantage of producing inherently noisy output.
Back projection algorithm
In practice of tomographic image reconstruction, often a stabilized and
With a sampled discrete system, the inverse Radon transform is


where is the angular spacing between the projections and is a Radon kernel with frequency response .



The name back-projection comes from the fact that a one-dimensional projection needs to be filtered by a one-dimensional Radon kernel (back-projected) in order to obtain a two-dimensional signal. The filter used does not contain DC gain, so adding DC bias may be desirable. Reconstruction using back-projection allows better resolution than interpolation method described above. However, it induces greater noise because the filter is prone to amplify high-frequency content.
Iterative reconstruction algorithm
The iterative algorithm is computationally intensive but it allows the inclusion of a priori information about the system .[2]
Let be the number of projections and be the distortion operator for the th projection taken at an angle . are a set of parameters to optimize the conversion of iterations.






![{\displaystyle f_{k}(x,y)=f_{k-1}(x,y)+\sum _{i=1}^{N}\lambda _{i}[p_{\theta _{i}}(r)-D_{i}f_{k-1}(x,y)]}](https://wikimedia.org/api/rest_v1/media/math/render/svg/d03e2569148c3e447738b0e62c161e4852051eb6)
An alternative family of recursive tomographic reconstruction algorithms are the algebraic reconstruction techniques and iterative sparse asymptotic minimum variance.
Fan-beam reconstruction
Use of a noncollimated fan beam is common since a
Deep learning reconstruction

Deep learning methods are widely applied to image reconstruction nowadays and have achieved impressive results in various image reconstruction tasks, including low-dose denoising, sparse-view reconstruction, limited angle tomography and metal artifact reduction. An excellent overview can be found in the special issue [5] of IEEE Transaction on Medical Imaging. One group of deep learning reconstruction algorithms apply post-processing neural networks to achieve image-to-image reconstruction, where input images are reconstructed by conventional reconstruction methods. Artifact reduction using the U-Net in limited angle tomography is such an example application.[6] However, incorrect structures may occur in an image reconstructed by such a completely data-driven method,[7] as displayed in the figure. Therefore, integration of known operators into the architecture design of neural networks appears beneficial, as described in the concept of precision learning.[8] For example, direct image reconstruction from projection data can be learnt from the framework of filtered back-projection.[9] Another example is to build neural networks by unrolling iterative reconstruction algorithms.[10] Except for precision learning, using conventional reconstruction methods with deep learning reconstruction prior [11] is also an alternative approach to improve the image quality of deep learning reconstruction.
Tomographic reconstruction software
Tomographic systems have significant variability in their applications and geometries (locations of sources and detectors). This variability creates the need for very specific, tailored implementations of the processing and reconstruction algorithms. Thus, most CT manufacturers provide their own custom proprietary software. This is done not only to protect intellectual property, but may also be enforced by a government regulatory agency. Regardless, there are a number of general purpose tomographic reconstruction software packages that have been developed over the last couple decades, both commercial and open source.
Most of the commercial software packages that are available for purchase focus on processing data for benchtop cone-beam CT systems. A few of these software packages include Volume Graphics, InstaRecon, iTomography, Livermore Tomography Tools (LTT), and Cone Beam Software Tools (CST).
Some noteworthy examples of open source reconstruction software include: RTK, [12] CONRAD,[13] TomoPy,[14] the ASTRA toolbox,[15][16] PYRO-NN,[17] ODL,[18] TIGRE,[19] and LEAP.[20]
Gallery
Shown in the gallery is the complete process for a simple object tomography and the following tomographic reconstruction based on ART.
-
 Fig. 2: Phantom object, two kitty-corner squares.
Fig. 2: Phantom object, two kitty-corner squares. -
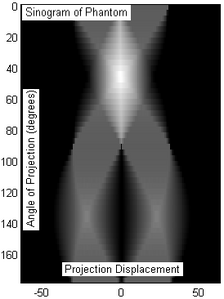 Fig. 3: Sinogram of the phantom object (Fig.2) resulting from tomography. 50 projection slices were taken over 180 degree angle, equidistantly sampled (only by coincidence the x-axis marks displacement at -50/50 units).
Fig. 3: Sinogram of the phantom object (Fig.2) resulting from tomography. 50 projection slices were taken over 180 degree angle, equidistantly sampled (only by coincidence the x-axis marks displacement at -50/50 units). -
 Fig.4:ART based tomographic reconstruction of the sinogram of Fig.3, presented as animation over the iterative reconstruction process. The original object could be approximatively reconstructed, as the resulting image has some visual artifacts.
Fig.4:ART based tomographic reconstruction of the sinogram of Fig.3, presented as animation over the iterative reconstruction process. The original object could be approximatively reconstructed, as the resulting image has some visual artifacts.



See also
- Operation of computed tomography#Tomographic reconstruction
- Cone beam reconstruction
- Industrial CT scanning
- Industrial Tomography Systems
References
- )
- ^ a b c d e Dudgeon and Mersereau (1984). Multidimensional digital signal processing. Prentice-Hall.
- ^ Herman, G. T., Fundamentals of computerized tomography: Image reconstruction from projection, 2nd edition, Springer, 2009
- ^ hdl:1721.1/13788.
- S2CID 46931303.)
{{cite journal}}: CS1 maint: multiple names: authors list (link - ^ Gu, Jawook and Ye, Jong Chul (2017). Multi-scale wavelet domain residual learning for limited-angle CT reconstruction. Fully3D. pp. 443–447.
{{cite conference}}: CS1 maint: multiple names: authors list (link) - doi:10.1007/978-3-030-00928-1_17.)
{{cite conference}}: CS1 maint: multiple names: authors list (link - PMID 31406960.)
{{cite journal}}: CS1 maint: multiple names: authors list (link - S2CID 46935914.
- S2CID 26897002.
- doi:10.1007/978-3-030-33843-5_10.)
{{cite conference}}: CS1 maint: multiple names: authors list (link - ^ [1]
- PMID 24320447.)
{{cite journal}}: CS1 maint: multiple names: authors list (link - PMID 25178011.)
{{cite journal}}: CS1 maint: multiple names: authors list (link - PMID 26057688.)
{{cite journal}}: CS1 maint: multiple names: authors list (link - PMID 27828452.)
{{cite journal}}: CS1 maint: multiple names: authors list (link - PMID 31389023.)
{{cite journal}}: CS1 maint: multiple names: authors list (link - ^ [2]
- ISSN 2057-1976.
- ^ [3]Kim, Hyojin; Champley, Kyle (2023). "Differentiable Forward Projector for X-ray Computed Tomography". ICML.
Further reading
- ISBN 0-87942-198-3.
- Bruyant, P.P. "Analytic and iterative reconstruction algorithms in SPECT" Journal of Nuclear Medicine 43(10):1343-1358, 2002
External links
- Slaney, A. C. Kak and Malcolm. "Principles of Computerized Tomographic Imaging". Slaney.org. Retrieved 7 September 2018.
- Insight ToolKit; open source tomographic support software
- "TomoPy — TomoPy 1.1.3 documentation". Tomopy.readthedocs.org. Retrieved 7 September 2018.
- ASTRA (All Scales Tomographic Reconstruction Antwerp) toolbox; very flexible, fast and open source software for computed tomographic reconstruction
- NiftyRec; comprehensive open source tomographic reconstruction software; Matlab and Python scriptable
- Open-source tomographic reconstruction and visualization tool
- "ITS plc - Electrical Process Tomography For Industrial Visualization". Itoms.com. Retrieved 7 September 2018.
| X-ray/ radiography |
| ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MRI | |||||||||||||
| Ultrasound | |||||||||||||
| Radionuclide |
| ||||||||||||
| Optical/Laser | |||||||||||||
| Thermography | |||||||||||||
| Target conditions |
| ||||||||||||